Dr.Gaida
Planungsbüro
Laurentiusstr.5
74 676 Niedernhall
Sparkasse
Krefeld
BLZ 320 500 00
Kto. 9046 4264
Tel: 07940 / 545 229
Fax.:
07940 / 545 228
Mobil:
01 637 637 636
www.drgaida.de
Lieferumfang elektrischer
Mückenputzantrieb
Dr.Gaida
Planungsbüro Laurentiusstr.5 74 676 Niedernhall Sparkasse
Krefeld BLZ 320 500 00 Kto. 9046 4264 Tel: 07940 / 545 229 Fax.:
07940 / 545 228 Mobil:
01 637 637 636 www.drgaida.de |
1. Generelles
der Mückenputzerantrieb ist dafür
ausgelegt Putzbügel z.B. der Firma
Pirker und Storka auszufahren und
einzuholen. Der Antrieb wird sowohl als
Bausatz
und je nach Verfügbarkeit als auch als fertig aufgebaute und
verdrahtete Einheiten geliefert.
Der Antrieb ist strikt nach der KISS
Methode konzipiert und aufgebaut
(KISS = Keep It Stupid Simple).
Der Antrieb besteht im wesentlichen aus
drei Baugruppen:
-
Steuerungseinheit mit getrennter Steuerung für jeden Flügel
-
Antriebseinheit mit Spule für rechten Flügel
-
Antriebseinheit mit Spule für linker Flügel
Die drei
Einheiten können völlig unabhängig voneinander untergebracht werden. Es ist
aber zu berücksichtigen, dass das Rückholseil möglichst wenig umgelenkt wird.
Die beiliegenden Bowdenzüge können verwendet werden, falls eine direkte
Zuführung des Rückholseils nicht möglich ist. Die Bowdenzüge dürfen mehrere
Kurven beschreiben diese sollten aber im möglichst großen Radius erfolgen. Der
Gesamtwinkel aller Kurven darf pro Bowdenzug 180° nicht überschreiten.
2. Seillänge
Auf der Spule
jeder Antriebseinheit ist ein kunststoffbeschichtetes Edelstahlseil aufgespult.
Nach dem Einbau der Einheiten im Rumpf wird das Seil abgespult und auf richtige
Länge abgeschnitten (siehe auch Beschreibung Pirker und Storka Putzbügel). Der
Putzbügel muß auch beim vollkommen abgespulten Seil noch komplett auf dem
Flügel liegen. Wir weisen an dieser Stelle ausdrücklich darauf hin, dass uns
Probleme bei Flugzeugen mit Spannweiten über 25m bekannt sind. Diese Probleme
entstehen bei allen uns bekannten elektrischen Antrieben und hängen vor allem
mit der extremen Seilauswehung zusammen. Die Knickung des Seils am Rumpf führt
vermutlich zu extrem hohen Reibungskräften. Die Verwendung von elektrischen
Antrieben bei Spannweiten über 20m wird von uns nicht empfohlen!
3. Betätigung
In
Ruhestellung leuchtet pro Flügel jeweils eine LED und zeigt die Wickelrichtung
des Seils auf der jeweiligen Spule an.
Für einen
Putzvorgang wird der Umschalter des jeweiligen Fügels in Richtung der
leuchtenden LED umgelegt und der Taster wird einmal gedrückt.
Der Motor
fährt das Seil aus und sobald das Seil vollständig ausgerollt ist wird es
wieder eingezogen.
Sobald der
Putzbügel den Rumpf erreicht hat schaltet der Antrieb automatisch ab.
Ein
Putzvorgang bei 15m Spannweite dauert ca. 45s.
Es wird
empfohlen den Umschalter in die Mittelstellung zu bringen (Ruhestellung)
4. Gewicht
Das Gewicht
des gesamten Einheit inklusive aller Komponenten beträgt weniger als 1500g.
Falls Sie eine fertige Einheit erworben haben gehen Sie bitte weiter zu
Schritt 7.
5. Montage
Antriebseinheiten
Die Motoren werden mittels der beiliegenden Nieten auf der Trägerplatte festgenietet.

Abb.1

Abb.2
Der Endschalter wird auf der Trägerplatte befestigt.

Abb.3
In das
Chassis wird ein M4 Gewinde geschnitten um die Justierschraube aufzunehmen, mit
der die Kraftbegrenzung eingestellt wird.
Die
Wickelrichtungserkennung wird mit 4 Nieten am Chassis montiert. Sie kann
wahlweise weggelassen werden, wenn Platz gespart werden muß.

Abb.4
Das Chassis
wird mit der Trägerplatte mittels Schraube und Stoppmutter verschraubt.
Zwischen Trägerplatte und Chassis wird die Feder eingelegt. (Siehe Abbildung 3)
In die
Wickelrichtungserkennung werden die Endschalter eingeschraubt wie in Abb.4 und
5 gezeigt.

Abb.5
Die Spule
wird auf der Motorwelle befestigt. Das Seil wird auf die Spule gewickelt.
Die Schalter, Taster und die LED´s werden in die Steuerungseinheit geschraubt.
Die Verdrahtung erfolgt gemäß des beiliegenden Schaltplanes.
7. Einbau in
das Flugzeug
Die drei
Einheiten können völlig unabhängig voneinander untergebracht werden. Es ist
aber zu berücksichtigen, dass das Rückholseil möglichst wenig umgelenkt wird.
Die beiliegenden Bowdenzüge können verwendet werden, falls eine direkte
Zuführung des Rückholseils nicht möglich ist. Die Bowdenzüge dürfen mehrere
Kurven beschreiben diese sollten aber im möglichst großen Radius erfolgen. Der
Gesamtwinkel aller Kurven darf pro Bowdenzug 180° nicht überschreiten.
Entsprechend
der Anleitung des Bügelherstellers werden Durchführungsöffnungen für das
Rückholseil in den Rumpf unterhalb des Flügels gebohrt. Die beiliegenden Tüllen
werden durch diese Bohrung gesteckt und eingeharzt. Die Tüllen dienen der
Aufnahme des Bowdenzuges. Das andere Ende des Bowdenzuges wird an der
Wickelrichtungserkennung angeschlossen.
Die Seile
werden durch die Bowdenzüge aus dem
Rumpf herausgeführt. Die Seile werden elektrisch oder manuell von den Spulen
gewickelt, wobei zu beachten ist, dass das Seil immer unter Spannung zu halten
ist.
Bei
vollkommen abgewickeltem Seil wird das Seil bis zur Flügelspitze gespannt und
abgeschnitten. Jetzt werden die Putzbügel gemäß Herstelleranleitung
angeschlossen, es ist zu prüfen, ob bei vollkommen abgewickeltem Seil die
Putzbügel noch komplett auf der Tragfläche liegen. Gegebenenfalls ist das Seil
zu kürzen. Eine Sicherheit muß ncht eingebaut werden, da während des Fluges das
Seil geringfügig durchhängt.
Nach der
erfolgten Verbindung der gleichfarbigen Adern der drei Einheiten kann die 12V
Anschlussspannung angeschlossen werden. Die Zuleitung ist mit 2A abzusichern.
Damit ist die
Montage abgeschlossen.
8.
Entstehungsgeschichte
Die sehr
teuren bisher erhältlichen Antriebe haben mich dazu angeregt einen einfacheren
Aufbau zu entwickeln. Dieser sollte auf jegliche Elektronik verzichten.
Nach den
ersten vielversprechenden Laborversuchen wurde eine erste Nullserie aufgelegt,
wobei bei den Nullserienantrieben auch die Federkraft justiert werden konnte.
Die folgenden
Bilder zeigen den ersten montierten Antrieb aus der Nullserie.

Erster Prototyp aus der Nullserie
Der Antrieb besteht aus einer Motor / Getriebe Einheit, die auf einem Träger montiert ist. Der Träger ist im Gehäuse auf einer Achser drehbar gelagert und mit einer Feder abgestützt.
Mit Hilfe
einer Schraube kann die Federvorspannung eingestellt werden.
Ebenfalls auf
dem Träger sitzen zwei Endschalter die die minimale und maximale Kraft
festlegen mit der das Seil des Putzbügels eingeholt wird. Die Auslösepunkte der
Endschalter werden mittels M4 Schrauben justiert.
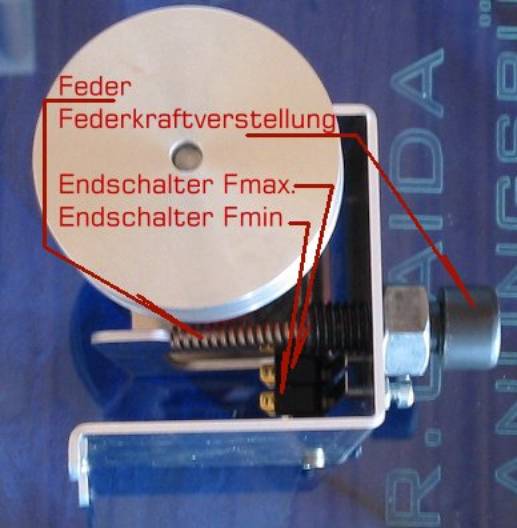
Erläuterung der Kraftverstellung
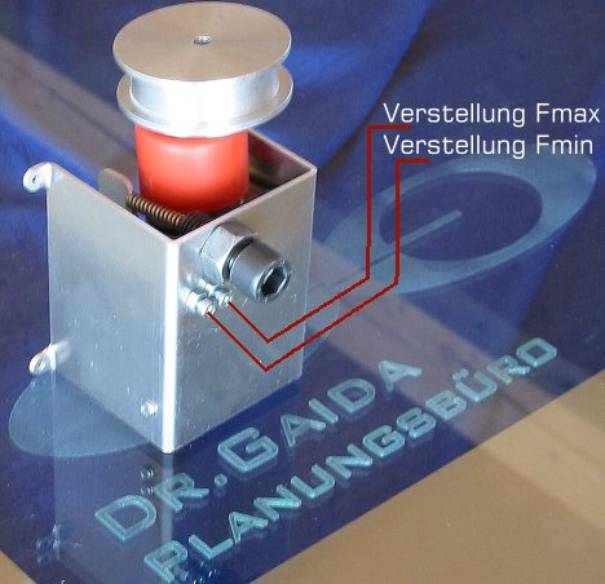
Erläuterung
der Verstellung der Endschalter